Image-guided surgical robot
图像引导手术机器人
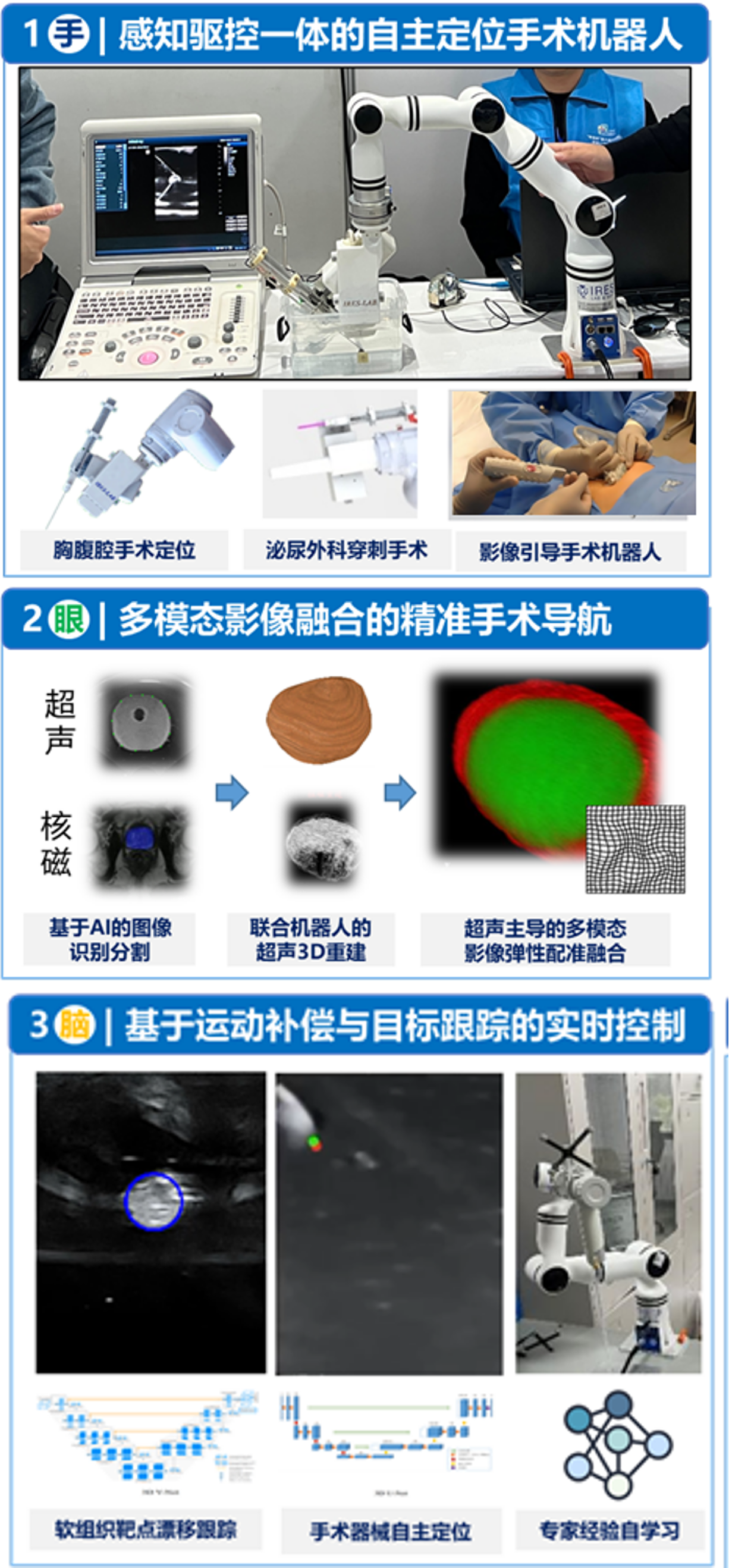
图1 图像引导手术机器人部分成果
Introduction
医学影像与机器人结合极大提高了精准医学发展,推动微创治疗的精准化、智能化。超声等图像引导手术机器人中,器械和影像需要 双重同步操作、手眼协同,超声等影像探测器需通过精密轻巧的机构进行伺服定位,完成对脏器的影像捕获、三维层析重建、病灶定 位等关键操作,消融/活检等手术器械需在机器人机构引导下精准到达病灶、动态跟踪靶点等关键操作,并克服生理运动、交互运动造 成的组织变形、靶点漂移。
因此,围绕超声等实时影像在软组织靶向诊疗等复杂医疗环境的关键问题,本方向重点研究微型轻量化机器人机构、手眼协同一体化、 RCM运动规划、软组织变形预测、视觉伺服跟踪控制等关键技术,实现影像引导下的病灶与器械动态感知、精准定位,并结合高水平专 家操作经验,关联语义,探索手术任务的模仿学习、迁移操作,研发手眼一体化穿刺机器人。开展机械结构设计、机电驱动集成、嵌入 式运动控制软件开发以及影像导航软件开发。
主要应用领域
- 完成泌尿外科、胸腹盆腔等多款手术机器人研发,可用于前列腺穿刺、肝胆穿刺、乳腺穿刺。
- 完成经自然腔道的灵巧操作柔性臂,与精准器械融合,可经自然腔道完成前列腺增生切除、膀胱肿瘤切除。