Laparoscopy navigation and embodied intelligent control
腹腔镜导航与具身智能控制
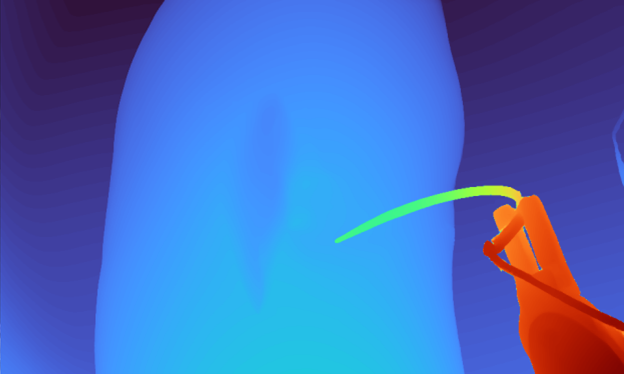
图1 腔镜手术机器人的目标三维重建
Introduction
手术机器人目前主要通过遥操作实现精细化作业,人在回路的方式控制机械臂运动。随着智能化发展,自主手术应于而生,从目 前的LoA 1-2级迈入LoA 3-4,重点解决受控环境中的关键手术任务自主化,推动复杂任务环境的高度全流程自主,达到长周期 手术的专家经验学习,技能泛化,在人体组织上进行稳健作业,实现具身智能操作的学习与控制。
项目组重点围绕软组织手术场景的高精度实时三维感知与重建、动态组织的精准识别与跟踪等、器械交互的跟踪定位与导航、 多臂协同手眼标定开展关键技术攻关,在机器人手术专家经验数据集构建基础上,基于Transformer等架构,通过模仿学习进行 端到端训练,达到手术机器人的感知、学习与具身控制,赋予手术机器人环境交互与自主决策能力,实现手术高度自主化。